ロボットアームは、人間の腕のように動く機械である。人はロボットアームにプログラミングをすることで、何をするかを指示する。物を拾ったり、物を作ったり、医師の手術を手伝ったりすることができる。ロボット工学はここ数年で大きく変わった。工場では以前よりも多くのロボットアームが使われるようになりました。
世界のロボットアーム市場は 2024年には$340億ドル以上.2032年には3倍の規模になるかもしれない。
自動車メーカーや電機メーカーは、溶接や組み立てにロボットアームを使用している。
中小企業がコボットと呼ばれる協働ロボットを使うのは、セットアップが簡単だからだ。
アジア太平洋地域は産業が急成長しているため、新しいロボット・プロジェクトが最も多い。
ロボット工学は、企業の仕事のスピードアップと人々の安全確保に役立っている。ロボットアームは今や私たちの生活の重要な一部となっている。
要点
ロボットアームは人間の腕のように動作する。ベース、ジョイント、リンク、モーター、センサーといった部品を使用する。これらの部品は、ロボットが動き、非常に注意深く作業を行うのを助ける。
ロボットアームにはさまざまなものがある。多関節型、スカラ型、パラレル型などがある。それぞれのタイプが特定の仕事に適している。重いものを持ち上げるものもある。あるものは重いものを持ち上げる。
ロボットアームは工場の作業をより速く、より安全にする。また、医師の手術にも役立っている。学校や義肢装具にも使われている。
モーターとセンサーはコントローラーと連動する。これにより、ロボットアームがスムーズに動く。また、ロボットがミスをしないようにするのにも役立ちます。
ロボット工学は新技術でより良くなる。ブレイン・コンピューター・インターフェースも役立つだろう。ロボットアームは私たちの生活にさらに役立つようになるだろう。
ロボットアームの主要部品とは?
ロボットアームの主な部品には、ベース、関節、リンク、エンドエフェクター、アクチュエーター、センサーなどがある。これらの部品が連携することで、正確な動きや様々な機能を実現することができる。
ロボットアームは人間の腕に似ているが、骨や筋肉の代わりに機械を使っている。それぞれの部品にはそれぞれの仕事がある。これらの仕事によって、ロボットアームは非常にうまく動き、物事を行うことができる。
ベース
ベースはロボットアームの底の部分。アーム全体を安定させている。ベースにはまったく動かないものもある。また、回転したり、トラックの上を滑ったりするものもあります。強固なベースは、ロボットアームの安全性とバランスを保つのに役立ちます。
関節
ジョイントはロボットアームのさまざまなパーツをつなぎます。関節はアームを曲げたり、回転させたり、スライドさせたりします。ジョイントにはいくつかの種類があります:
レボリュート(ロータリー)ジョイント 腕は肘のように一点を中心に回す。
プリズム(リニア)ジョイント アームを引き出しのように一直線に動かす。
ハイブリッド・ジョイント 回転とスライドの両方が可能なので、アームはより多くの動きをすることができる。
ヒント 関節の数と種類によって、ロボットアームの動き方が決まる。関節と軸が多ければ多いほど、アームはより難しい動きをすることができる。
以下はその表である。 ジョイントタイプ そしてどのように動くのか:
ジョイントタイプ | 移動能力 | メリット | 制限事項 |
|---|---|---|---|
レボリュート(ロータリー) | 1点を振り向く | 組み立ては簡単、移動は慎重に | 重いものを持つとストレスを感じる。 |
プリズム(リニア) | 直線で滑る | 正確な位置に動く、強い力 | 遠くに移動できない。 |
球形 | つのポイントを回る | 非常に柔軟で、本物の腕のように動く | 建設が難しい |
ユニバーサル | ターンは2通り | 柔軟性があり、整列していない部分を結合できる | 建設が難しい |
円筒形 | スライドとターン | より多くの動きが可能 | 建設が難しい |
リンク
リンクは関節と関節の間にある硬い部分だ。腕の骨のようなものです。各リンクはロボットアームを長くしたり短くしたりします。リンクの大きさや形によって、アームが届く距離や拾えるものが変わります。
エンドエフェクター
エンドエフェクターは、ロボットアームの先端にあるツールだ。つかんだり、溶接したり、塗装したり、あるいは医師を助けたりといった主な作業を行います。エンドエフェクタの中には、手や爪のように見えるものもあります。また、さまざまな作業用の吸盤や特殊なツールを備えているものもあります。
モーターとセンサー
モーターはロボットアームの筋肉のようなものだ。関節やリンクをとても注意深く動かします。サーボモーターやステッピングモーターなど、さまざまなモーターがアームのスムーズな動きと適切な位置での停止をサポートします。
センサーはロボットアームの感覚のようなものだ。位置、力、触覚などをロボットに伝えます。例えば、近接センサーはアームが物にぶつからないようにします。力センサーは、アームがどれだけ強く押したり引いたりするかをチェックします。視覚センサーはアームが物を見るのを助けます。タッチセンサーは、アームが物を優しく保持するのを助けます。
コンポーネント | 精密制御における役割 | 例と詳細 |
|---|---|---|
モーター | 関節とリンクを慎重に動かす | サーボモーター、ステッピングモーター、ブラシレスDCモーター、ダイレクトドライブモーター |
センサー | 位置、力、タッチに関するフィードバックを与える | 近接センサー、力センサー、ビジョンセンサー、タッチセンサー |
コントローラー | センサーデータを使い、モーターに指示を出す "頭脳 | スピード、方向、力をコントロールし、より良い選択をするためにAIを使用する。 |
モーターとセンサー が連携してロボットアームを制御する。コントローラーは脳のようなものだ。センサーデータを使ってモーターに指示を出す。このチームワークのおかげで、ロボットアームは慎重に物を動かし、ミスを避け、正確に仕事を終えることができるのです。
注: より優れたモーターとセンサーは、ロボットアームがより難しい仕事をこなすのを助ける。
ロボットアームはどのように動くのか?
ロボットの腕は、人間の腕とよく似た動きをする。関節と軸を使い、手を伸ばしたり、回転したり、物をつかんだりする。それぞれの動きは、ロボットアームがその仕事をうまくこなせるよう、注意深く設計されたものだ。
ムーブメントの種類
ロボットアームはいくつかの種類の動きをすることができる。これらの動きは、物を拾ったり、置いたり、組み立てたりするのに役立つ。主な種類は以下の通り:
回転:腕は、人が手首を回すように、一点を中心に回転することができる。
曲げ:腕の関節を曲げることができる。
スライディング:アームの一部は、引き出しを引き出すように直線的にスライドすることができる。
拡張:人が高い棚の上のものを取るように、腕を伸ばして遠くまで伸ばすことができる。
ロボットアームとは、人間の腕の動きをコピーした道具だと考えてほしい。このデザインは、工場や病院、さらには宇宙で、アームがさまざまな作業をするのに役立つ。
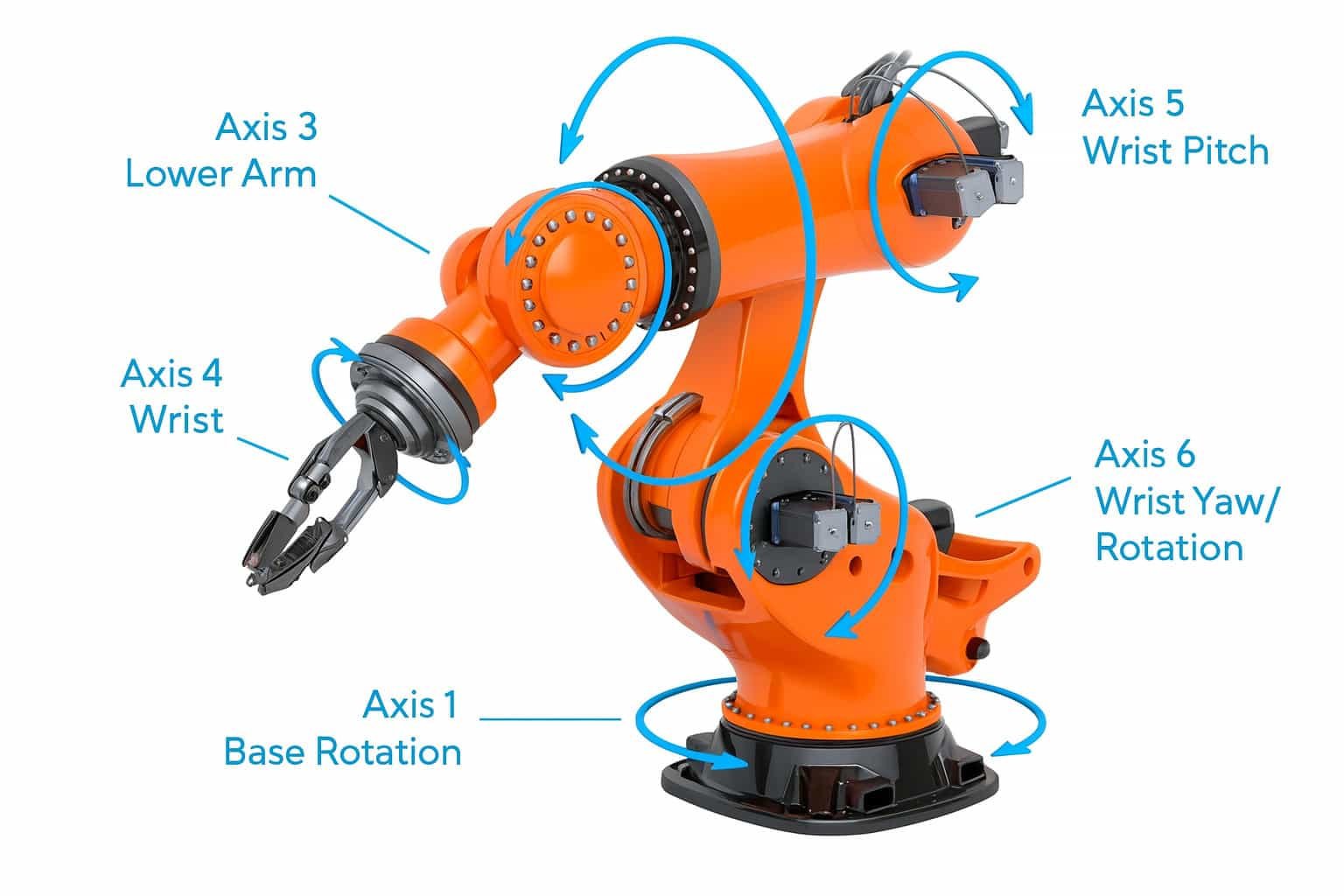
関節と軸
関節はロボットアームの各パーツをつないでいる。それぞれのジョイントによって、アームは一定の動きをします。ジョイントが動く場所は軸と呼ばれます。すべての軸は、アームに新しい動く方向を与えます。
単純なロボットアームなら、関節は2つか3つしかないかもしれない。
より高度な腕は、6つ以上の関節を持つことができる。
各ジョイントに新しい軸が追加されるため、アームはより多くの方向に動くことができる。
以下は、関節と軸がどのように連動するかを示した表である:
ジョイントタイプ | 移動の軸 | 人間の腕の例 |
|---|---|---|
肩関節 | 上下に回転 | 腕を上げる |
肘関節 | 曲げ伸ばし | 肘を曲げる |
手関節 | 回転し、曲がる | 手首を回す |
ロボットアームはモーターを使って関節を動かす。センサーはアームが自分の位置を把握し、ミスを避けるのに役立つ。人がロボットアームをコントロールする場合、コンピューターや特別なコントローラーを使ってモーターに命令を送ります。
自由度
自由度とは、ロボットアームが何通り動けるかを表す。各関節と軸で1つの自由度が追加されます。自由度が高ければ高いほど、アームはより柔軟になります。
基本的なロボットアームは3つの自由度を持つ。上下、左右、前後に動くことができる。
ほとんどの産業用ロボットアームは6自由度を持っている。これにより、ほとんどどんな位置や角度にも到達することができる。
先進的なロボットアームの中には、最大7つの自由度を持つものもある。これらのアームは、人間の腕のように非常に複雑な方法でねじったり回したりすることができる。
自由度が高いということは、ロボットアームが小さな部品の組み立てや手術の手伝いなど、より難しい仕事をこなせるということだ。
エンジニアは特殊なソフトウェアを使用して、自由度の高いロボットアームを制御する。このソフトウェアは、困難な作業であってもアームがスムーズかつ安全に動くのを助ける。
ロボットアームの種類とは?
ロボットアームにはいくつかの種類がある。 主な種類.それぞれのタイプには特別な形と仕事がある。下の表は、主な種類とその動き方、そして人々が最もよく使う場所を示している。
ロボットタイプ | どのように 動きとルックス | 一般的な用途 | 特集 |
|---|---|---|---|
アーティキュレーテッド | 人間の腕のようにいくつもの関節があり、さまざまにねじったり曲げたりできる。 | 溶接、組立、梱包 | 最も柔軟性があり、重い荷物にも対応 |
スカラ | 上下左右に動き、平らな面に最適 | 迅速な組立、ピッキング、仕分け | 非常に高速で小さな部品も正確に処理 |
パラレル | 複数のアームが連動して先端を素早く動かす | 高速組立、ピック&プレース | 超高速。軽い被写体に最適 |
円筒形 | 上下にスライド、ベースの周りを回転 | 機械作業、簡単な組み立て | 狭いスペースに手が届く |
ポーラー | 根元が回転し、望遠鏡のように外側に伸びる | ダイカスト、溶接、マテリアルハンドリング | シンプルな動きで広範囲をカバー |
アーティキュレーテッド
多関節ロボットの腕は、人の腕のように見える。多くの回転関節があり、多くの動きができる。これらのアームは、物をねじったり、曲げたり、手を伸ばしたりすることができる。工場では溶接や梱包に多関節アームを使用している。また、慎重な組み立て作業にも適している。これらのアームは、重いものを持ち上げたり、多方向に動いたりすることができる。
スカラ
SCARAとはSelective Compliance Assembly Robot Arm(選択的コンプライアンス組立ロボットアーム)の略。このアームは平らな面で最もよく動く。上下左右に動くことができる。スカラアームは非常に高速で正確です。小さな部品の組み立てラインで使われています。電子機器メーカーや医療メーカーは、そのスピードからスカラロボットを好んで使用しています。
パラレル
平行ロボットアームはデルタロボットとも呼ばれる。1つのベースに数本のアームが結合している。すべてのアームが一緒に動き、先端を制御する。これらのロボットは非常に速く動き、軽いものを素早くピックアップする。工場では商品のピッキングや配置にパラレルアームを使用している。重いものを持ち上げるよりもスピードを重視する場合に最適です。
円筒形
円筒形のロボットアームはベースが回転する。アームは上下にスライドし、伸ばすことができる。このデザインにより、アームは深い場所や狭い場所にも届く。円筒形のアームは、機械の手入れや簡単な組み立てに使われる。これらのアームは、直進や旋回が必要な作業に適しています。
ポーラー
ポーラーロボットのアームは、ベースが回転し、アームが伸びる。アームは望遠鏡のように上下に動くこともできる。これにより、アームは大きく丸い作業エリアを確保できる。ポーラーアームは、ダイカスト、溶接、物の移動などに役立ちます。広いリーチを必要とする単純作業に最適です。
ロボットアームのタイプはそれぞれ、特定の仕事に適している。例えば、多関節アームやスカラアームは次のような用途によく使われる。 自動車工場.平行アームは迅速な包装に最適です。円筒アームと極アームは、簡単な繰り返し作業に役立ちます。
ロボットアームの一般的な用途とは?
ロボットアームは、組立、溶接、塗装、マテリアルハンドリングなど、さまざまな産業で広く使用されている。ロボットアームは、製造や生産工程における精度、効率、安全性を高めます。

産業
ロボットアームは工場では非常に重要だ。作業員は、物を組み合わせたり、溶接したり、梱包したりするのに使う。これらの機械は、迅速かつ正確な作業が必要な場合に役立つ。自動車メーカーはエンジンやドアの製造にロボットアームを使う。電子機器工場では、小さな部品を組み立てるのに使われている。多くの企業がロボットアームを選ぶ理由は、同じ作業を何度も繰り返してくれるからだ。そのため、作業が迅速化し、人々の安全が保たれる。
日常生活
ロボットアームは今や家庭や公共の場で見かけるようになった。スマートキッチンで料理を作るのを手伝っている人もいる。スナックや飲み物を提供する自動販売機でロボットアームを見かけるかもしれない。病院では、医師の慎重な手術を助けるためにロボットアームが使われている。これらの用途は、ロボットアームがいかに日々の仕事をより簡単に、より正確にするかを示している。ロボットアームがブレイン・コンピューター・インターフェイスに接続されることもある。これにより、人々は自分の脳でアームを操作することができる。
DIYと教育
学生やホビーファンは、学び、楽しむためにロボットアームを作る。多くの学校がロボット工学を教えるためにキットを使用している。これらのキットは、生徒がロボットアームの組み立て方やプログラミングを学ぶのに役立ちます。教師は、機械がどのように命令に従うかを示すためにロボットアームを使用します。Makerは、3Dプリントや簡単な組み立てなどのホームプロジェクトにロボットアームを使用します。このような使い方は、人々が創造性を発揮し、問題を解決するのに役立ちます。
現在、多くの学校用キットにはブレイン・コンピューター・インターフェース機能が付いている。生徒たちは脳の信号がどのようにロボットの腕を動かすかを見ることができ、学習がより楽しくなる。
補綴
エンジニアたちは、腕を失った人々を助けるためにロボットアームを作っている。これらの義手はセンサーを使って筋肉の動きを感知する。新しいモデルの中には、ブレイン・コンピューター・インターフェースを使用しているものもあり、ユーザーは自分の思考で腕を動かすことができる。義手のロボットアームは、人々が食事をしたり、字を書いたり、日常的なことをするのを助ける。これらのアームは、人々がよりよく生き、より自立するのを助ける。
スペース
宇宙グループは、多くの大きな仕事にロボットアームを使用している。国際宇宙ステーションでは、DextreとCanadarm2が修理や組み立てを手伝っている。Dextreは しちかんせつ 触った感触がわかるので、丁寧な仕事をする。Canadarm2はDextreをさまざまな場所に移動させる。ClearSpace-1ミッションでは、4つのロボットアームを使って宇宙ゴミをつかんで取り除く。これらのロボットアームは、宇宙飛行士にとって宇宙での作業をより安全なものにする。
宇宙ロボットアーム | メインタスク | 特集 |
|---|---|---|
デクストレ | メンテナンスと組み立て | 7つの関節、触覚感知 |
カナダアーム2 | 輸送および組立作業 | 他のロボットを動かす、フレキシブル |
クリアスペース-1 | 瓦礫撤去 | 物をつかむための4本のアーム |
ロボットアームは工場、家庭、学校、病院、宇宙などで使われている。組み立て作業もできるし、ブレイン・コンピューター・インターフェイス技術とも連携できる。これは未来への新しいアイデアを開くものだ。
なぜロボットアームが重要なのか?
ロボットアームは、様々な産業において効率性、精密性、安全性を向上させるため、非常に重要である。これらの機械装置は、反復作業を自動化し、ヒューマンエラーを減らし、危険物を取り扱うことで、最終的に生産性と職場の安全性を向上させます。

メリット
ロボットアームが両工場を助ける 工場や病院では、さまざまな面で役立っている。工場では、ロボットのおかげでコストが下がり、作業も速くなる。危険な仕事や退屈な仕事はロボットがやってくれるので、労働者はより安全になる。病院では、ロボットアームが医師の手術をより丁寧に行う手助けをする。切り傷が小さく、出血が少ないため、患者の回復が早くなる。病院では、ロボットが洗浄や薬の運搬を行い、感染を防ぐのに役立っている。
セクター | ロボットアームの利点 | 詳細と具体例 |
|---|---|---|
製造業 | ロボットが人間の代わりに反復作業を行い、効率を上げ、経済成長を支える。 | |
ヘルスケア | 正確で低侵襲な手術、より高い成功率、より良い患者ケア | 手術ロボットは3Dビューを提供し、切開創を小さくし、回復を早める。ロボットはロジスティックスとサニテーションを支援する。 |
ロボット工学が義肢を作る より良くロボットアームの中には、神経に接続することで、義肢がよりリアルに感じられ、よりよく機能するものもある。ソーシャルロボットは、脳卒中や脳損傷後の人々の回復を助けます。このようなロボットは、治療を終え、技術を取り戻そうとする人々を応援します。
ロボットアームが医療スタッフのトレーニングに役立つ 患者のように振る舞うことで
ロボットを使えば、医師はコンピューターを使って遠くからでも手術ができる。
AIを搭載したロボットが薬を配ったり、患者を見守ったりすることで、より安全なケアが可能になる。
制限事項
ロボットアームにも問題はある。購入や設置にお金がかかる。小規模の企業には十分な資金がないかもしれない。仕事によっては、ロボットができない思考や創造性を必要とするものもある。ロボットアームは頻繁に点検し、修理する必要がある。壊れたら修理に時間とお金がかかる。病院では、医師がロボットシステムを安全に使うための新しい方法を学ばなければならない。
未来
ロボット工学は間もなくさらに進歩する。新しいロボットアームは、より賢いセンサーとより優れたソフトウェアを搭載するだろう。ブレイン・コンピューター・インターフェースを使用するものも出てくるだろう。これは障害を持つ人々を助け、手術をより安全にする。ロボットは工場、病院、家庭でより多く使われるようになるだろう。ロボットが使いやすくなるにつれて、より多くの人々がロボットの助けを借りるようになるだろう。
ロボットアームには、人が動くように動作する簡単な部品があります。簡単な手順と例に従うことで、ロボットアームを理解することができます。ロボットアームを作ったりコーディングしたりすることで、多くの生徒が新しいことを学び、自分に自信を持つことができます。下の表は、ロボット工学の学習がSTEMの分野で生徒の成績向上にどのように役立つかを示しています。
アスペクト | ロボット教育はSTEMへの関心をどのように喚起するか |
|---|---|
習得スキル | コーディング、エンジニアリング・デザイン、チームワーク |
利益 | |
モチベーション | 親善試合とチームワークが関心を高める |
ロボット工学を学ぶことは、生徒たちに新しいアイデアを与え、将来の仕事を見つけるのに役立つ。
よくあるご質問
ロボットアームと人間の腕の違いは何ですか?
ロボットの腕にはモーター、センサー、金属部品が使われている。人間の腕は筋肉、神経、骨を使っている。どちらも物を動かしたりつかんだりできるが、ロボットアームはプログラムされた指示に従う。
ロボットアームは人間のように物体を感じることができるのか?
ロボットアームは人間のように感じることはできない。一部のロボットアームは、圧力や接触を検知するためにタッチセンサーを使用している。これらのセンサーは、アームが物体を優しく保持するのに役立つが、実際の感覚を与えることはできない。
人はどうやってロボットの腕をコントロールするのか?
人はコンピューターやジョイスティック、特殊なコントローラーを使ってロボットアームを操作する。先進的なアームの中には、ブレイン・コンピューター・インターフェースを使ったものもある。これにより、ユーザーは動作を考えることでアームを動かすことができる。
ロボットアームは人の周りで使っても安全か?
最近のロボットアームのほとんどは、安全機能を備えている。センサーは人に近づきすぎるとアームを停止させる。コボットは工場や学校で人間と一緒に安全に働くことができる。
生徒たちは自分でロボットアームを作れるのか?
はい!多くのキットは、生徒がロボットアームを組み立て、プログラミングするのに役立ちます。これらのキットは、コーディング、エンジニアリング、問題解決を教えます。生徒たちは実践的なプロジェクトを行うことで学びます。
