Рука-робот - это машина, которая двигается как человеческая рука. Люди указывают роботу, что делать, программируя его. Она может поднимать предметы, создавать конструкции или помогать врачам в операциях. За последние несколько лет робототехника сильно изменилась. Сейчас на фабриках используется больше роботов, чем раньше.
Мировой рынок роботизированных рук был более $34 млрд в 2024 году. К 2032 году он может стать в три раза больше.
Компании, производящие автомобили и электронику, используют роботизированные руки для сварки и сборки деталей.
Небольшие компании используют совместных роботов, называемых коботами, потому что они просты в настройке.
В Азиатско-Тихоокеанском регионе реализуется больше всего новых проектов в области робототехники, поскольку его отрасли быстро развиваются.
Робототехника помогает компаниям работать быстрее, а людям - безопаснее. Роботизированная рука теперь является важной частью нашей жизни.
Основные выводы
Руки роботов действуют подобно человеческим рукам. В них используются такие детали, как основания, суставы, звенья, двигатели и датчики. Эти детали помогают им двигаться и выполнять задачи очень аккуратно.
Существуют различные манипуляторы для роботов. Некоторые из них шарнирные, SCARA или параллельные. Каждый тип подходит для определенных работ. Одни поднимают тяжелые предметы. Другие быстро собирают вещи.
Руки роботов помогают заводам работать быстрее и безопаснее. Они также помогают врачам во время операций. Они используются в школах и для протезирования.
Двигатели и датчики работают с контроллерами. Это помогает манипуляторам роботов двигаться плавно. Это также помогает им не совершать ошибок.
Робототехника будет становиться все лучше благодаря новым технологиям. Помогут и интерфейсы "мозг-компьютер". Роботизированные руки станут еще более полезными в нашей жизни.
Из каких частей состоит рука робота?
Основными частями руки робота являются основание, суставы, звенья, концевые эффекторы, исполнительные механизмы и датчики. Эти компоненты работают вместе, обеспечивая точность движений и различные функциональные возможности.
Роботизированная рука похожа на человеческую, но вместо костей и мышц в ней используются механизмы. У каждой детали есть своя работа. Благодаря этим функциям рука-робот двигается и делает все очень хорошо.
База
Основание - это нижняя часть руки робота. Она удерживает всю руку в устойчивом положении. Некоторые основания вообще не двигаются. Другие могут поворачиваться или скользить по дорожке. Прочное основание помогает руке робота сохранять безопасность и равновесие во время работы.
Суставы
Шарниры соединяют различные части руки робота. Они позволяют руке сгибаться, поворачиваться или скользить. Существует несколько видов шарниров:
Револьверные (вращательные) шарниры пусть рука повернется вокруг одной точки, как локоть.
Призматические (линейные) соединения Двигайте руку по прямой линии, как ящик.
Гибридные соединения может как поворачиваться, так и скользить, поэтому рука может двигаться большим количеством способов.
Совет: Количество и вид суставов определяют, каким образом может двигаться рука робота. Большее количество суставов и осей позволяет руке совершать более сложные движения.
Вот таблица, которая показывает типы суставов и как они двигаются:
Тип соединения | Возможность перемещения | Преимущества | Ограничения |
|---|---|---|---|
Револьверный (поворотный) | Поворачивается вокруг одной точки | Легко строится, двигается осторожно | Не может далеко передвигаться, испытывает стресс при работе с тяжелыми предметами |
Призматический (линейный) | Скользит по прямой | Перемещается в точные места, сильная сила | Не может далеко двигаться, изнашивается через некоторое время |
Сферическая | Оборачивается вокруг двух точек | Очень гибкая, двигается как настоящая рука | Сложнее построить |
Универсальный | Поворачивается двумя способами | Гибкий, соединяет детали, которые не совпадают | Сложнее построить |
Цилиндрические | Скольжения и повороты | Может двигаться более активно | Сложнее построить |
Ссылки
Связки - это твердые части между суставами. Они похожи на кости в вашей руке. Каждое звено делает руку робота длиннее или короче. От размера и формы звеньев зависит, как далеко может дотянуться рука и что она может поднять.
Концевой эффектор
Конечный эффектор - это инструмент на конце руки робота. Он выполняет основную работу, например, захватывает, сваривает, красит или даже помогает врачам. Некоторые концевые эффекторы выглядят как руки или клешни. Другие имеют присоски или специальные инструменты для различных работ.
Двигатели и датчики
Моторы - это как мышцы руки робота. Они очень аккуратно перемещают суставы и звенья. Различные двигатели, например сервомоторы или шаговые двигатели, помогают руке двигаться плавно и останавливаться в нужном месте.
Датчики - это как органы чувств руки робота. Они сообщают роботу о положении, силе и прикосновении. Например, датчики приближения помогают руке не натыкаться на предметы. Датчики силы проверяют, насколько сильно рука толкает или тянет. Датчики зрения помогают руке видеть предметы. Сенсорные датчики помогают манипулятору бережно держать предметы.
Компонент | Роль в прецизионном контроле | Примеры и подробности |
|---|---|---|
Моторы | Перемещайте суставы и звенья с осторожностью | Серводвигатели, шаговые двигатели, бесщеточные двигатели постоянного тока, двигатели с прямым приводом |
Датчики | Обратная связь о положении, силе и прикосновении | Датчики приближения, датчики силы, датчики зрения, датчики касания |
Контроллер | Это "мозг", который использует данные датчиков и указывает двигателям, что делать. | Управляет скоростью, направлением и силой; использует искусственный интеллект, чтобы сделать лучший выбор |
Двигатели и датчики работают вместе, чтобы управлять рукой робота. Контроллер - это как мозг. Он использует данные датчиков, чтобы сообщить двигателям, что нужно делать. Такая совместная работа позволяет роботу аккуратно перемещать предметы, избегать ошибок и выполнять работу с высокой точностью.
Примечание: Более совершенные двигатели и датчики помогают роботу выполнять более сложную работу.
Как двигаются роботизированные руки?
Роботизированные руки двигаются так, что очень похожи на человеческие. Они используют суставы и оси, чтобы доставать, поворачивать и захватывать предметы. Каждое движение происходит благодаря тщательно продуманной конструкции, которая позволяет роботизированной руке хорошо выполнять свою работу.
Виды движения
Роботизированная рука может выполнять несколько типов движений. Эти движения помогают ему поднимать, размещать или собирать предметы. К основным типам относятся:
Вращающийся: Рука может вращаться вокруг точки, подобно тому, как человек поворачивает запястье.
Сгибание: Рука может сгибаться в суставах, подобно тому, как работает локоть.
Раздвижные: Некоторые части руки могут скользить по прямой линии, как при выдвижении ящика.
Расширение: Рука может вытянуться, чтобы дотянуться дальше, как человек тянется за чем-то на высокой полке.
Роботизированная рука - это инструмент, который копирует движения человеческой руки. Такая конструкция помогает руке выполнять множество различных задач на заводах, в больницах и даже в космосе.
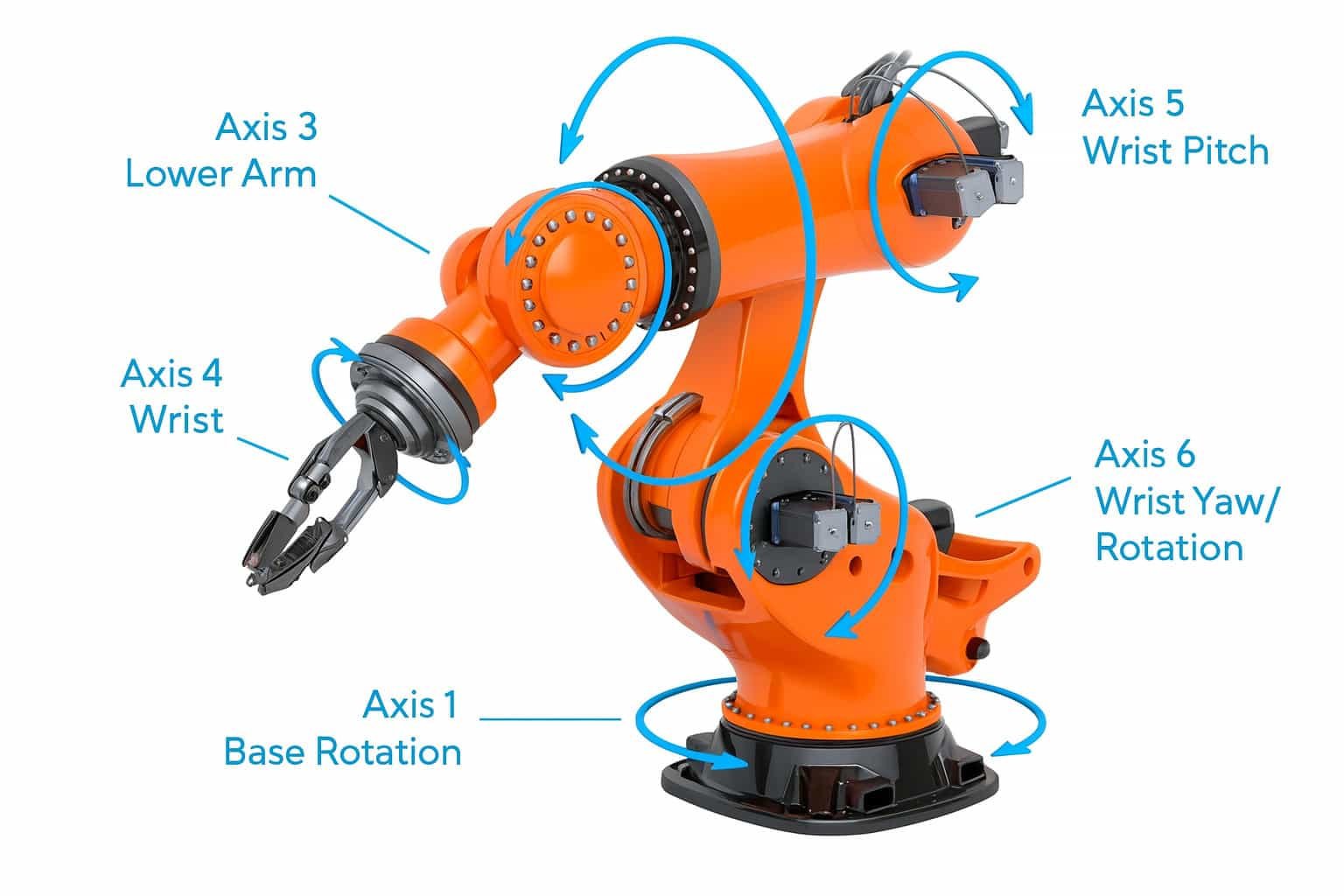
Суставы и оси
Суставы соединяют части роботизированной руки. Каждый сустав позволяет руке двигаться определенным образом. Место, куда перемещается сустав, называется осью. Каждая ось дает руке новое направление движения.
Простая роботизированная рука может иметь всего два или три сустава.
Более совершенные руки могут иметь шесть и более суставов.
Каждый шарнир добавляет новую ось, а значит, рука может двигаться в нескольких направлениях.
Вот таблица, показывающая, как суставы и оси работают вместе:
Тип соединения | Ось движения | Пример на человеческой руке |
|---|---|---|
Плечевой сустав | Вращается вверх и вниз | Поднятие руки |
Локтевой сустав | Сгибается и выпрямляется | Сгибание локтя |
Запястный сустав | Вращается и сгибается | Поворот запястья |
Роботизированная рука использует двигатели для перемещения суставов. Датчики помогают манипулятору определить свое положение и избежать ошибок. Когда люди управляют роботизированной рукой, они используют компьютеры или специальные контроллеры для подачи команд на двигатели.
Степени свободы
Степени свободы описывают, как может двигаться роботизированная рука. Каждый сустав и ось добавляют одну степень свободы. Чем больше степеней свободы, тем более гибким становится манипулятор.
Базовый роботизированный манипулятор может иметь три степени свободы. Она может двигаться вверх и вниз, влево и вправо, вперед и назад.
Большинство промышленных роботов имеют шесть степеней свободы. Это позволяет им достигать практически любого положения и угла.
Некоторые современные роботизированные руки имеют до семи степеней свободы. Такие руки могут крутиться и поворачиваться очень сложными способами, как человеческая рука.
Больше степеней свободы означает, что роботизированная рука может выполнять более сложную работу, например, собирать мелкие детали или помогать в хирургии.
Инженеры используют специальное программное обеспечение для управления роботизированной рукой с множеством степеней свободы. Это программное обеспечение помогает манипулятору двигаться плавно и безопасно, даже если задача сложная.
Каковы различные типы роботизированных рук?
Роботизированные руки бывают нескольких видов основные типы. Каждый тип имеет особую форму и работу. В таблице ниже представлены основные типы, способы их перемещения и места, где они чаще всего используются.
Тип робота | Как это Движения и внешний вид | Общее использование | Специальные возможности |
|---|---|---|---|
Сочлененный | Имеет несколько суставов, как человеческая рука; может скручиваться и сгибаться различными способами | Сварка, сборка, упаковка | Наиболее гибкий; выдерживает большие нагрузки |
SCARA | Перемещается вверх, вниз и в стороны; лучше всего работает на плоских поверхностях | Быстрая сборка, комплектация, сортировка | Очень быстро и точно для мелких деталей |
Параллель | Несколько рук работают вместе, чтобы быстро перемещать наконечник | Высокоскоростная сборка, подбор и размещение | Очень быстро; лучше всего подходит для легких объектов |
Цилиндрические | Скользит вверх и вниз, вращается вокруг основания | Машинное обслуживание, простая сборка | Хорошо подходит для работы в ограниченном пространстве |
Polar | Вращается у основания и выдвигается наружу, как телескоп | Литье под давлением, сварка, обработка материалов | Охватывает большую площадь простыми движениями |
Сочлененный
Шарнирные руки робота похожи на руки человека. У них много поворотных шарниров, обеспечивающих большую подвижность. Такие руки могут поворачиваться, сгибаться и тянуться к предметам. На фабриках шарнирные руки используются для сварки и упаковки. Они также хороши для аккуратной сборки. Такие руки могут поднимать тяжелые предметы и двигаться в разных направлениях.
SCARA
SCARA означает Selective Compliance Assembly Robot Arm. Эта рука лучше всего передвигается по плоским поверхностям. Он может двигаться вверх, вниз и из стороны в сторону. Руки SCARA очень быстрые и точные. Их используют на сборочных линиях для изготовления мелких деталей. Компании, производящие электронику и лекарства, любят роботов SCARA за их скорость.
Параллель
Параллельные руки робота также называют дельта-роботами. У них несколько рук, соединенных с одним основанием. Все руки двигаются вместе, чтобы управлять наконечником. Такие роботы двигаются очень быстро и быстро поднимают легкие предметы. На фабриках параллельные манипуляторы используются для подбора и размещения товаров. Они лучше всего работают, когда скорость важнее, чем подъем тяжелых предметов.
Цилиндрические
Цилиндрические руки робота имеют основание, которое вращается. Рука скользит вверх и вниз и может вытягиваться. Такая конструкция позволяет манипулятору проникать в глубокие или узкие места. Цилиндрические манипуляторы используются для обслуживания машин и простой сборки. Такие манипуляторы хорошо подходят для работ, требующих прямолинейных и поворотных движений.
Polar
У полярного робота-руки есть основание, которое поворачивается, и рука, которая вытягивается. Рука также может двигаться вверх и вниз, как телескоп. Благодаря этому манипулятор имеет большую круглую рабочую зону. Роботы Polar помогают при литье под давлением, сварке и перемещении предметов. Они лучше всего подходят для простых работ, требующих широкого охвата.
Каждый тип манипулятора робота подходит для определенных работ. Например, шарнирные манипуляторы и манипуляторы SCARA широко распространены в автомобильные заводы. Параллельные манипуляторы отлично подходят для быстрой упаковки. Цилиндрические и полярные рычаги помогают выполнять легкие повторяющиеся задачи.
Как часто используются роботизированные руки?
Роботы-руки широко используются в различных отраслях промышленности для выполнения таких задач, как сборка, сварка, покраска и обработка материалов. Они повышают точность, эффективность и безопасность производственных и технологических процессов.

Промышленность
Роботы-руки очень важны на заводах. С их помощью рабочие собирают вещи, сваривают и упаковывают предметы. Эти машины помогают, когда работа должна быть быстрой и точной. Автопроизводители используют роботов для сборки двигателей и дверей. На заводах по производству электроники они используются для сборки мелких деталей. Многие компании выбирают роботизированные манипуляторы, потому что они выполняют одну и ту же работу снова и снова. Это ускоряет работу и обеспечивает безопасность людей.
Повседневная жизнь
Роботы-руки теперь можно встретить в домах и общественных местах. Некоторые люди используют их на умных кухнях, чтобы помогать готовить еду. Вы можете увидеть роботизированные руки в торговых автоматах, которые выдают закуски или напитки. В больницах роботы-руки помогают врачам проводить аккуратные операции. Эти способы использования показывают, как роботизированные руки облегчают повседневную работу и делают ее более точной. Иногда роботизированные руки подключаются к интерфейсу "мозг-компьютер". Это позволяет людям управлять рукой с помощью мозга.
Самоделки и образование
Школьники и любители робототехники собирают роботов, чтобы учиться и развлекаться. Многие школы используют наборы для обучения робототехнике. Эти наборы помогают ученикам научиться собирать роботов и программировать их. Учителя используют манипуляторы-роботы, чтобы показать, как машины выполняют приказы. Создатели используют манипуляторы-роботы для домашних проектов, таких как 3D-печать или простое строительство. Такое использование помогает людям проявлять творческий подход и решать проблемы.
Многие школьные наборы теперь оснащены интерфейсом "мозг-компьютер". Ученики могут увидеть, как сигналы мозга приводят в движение руки робота, что делает обучение более увлекательным.
Протезирование
Инженеры создают роботизированные руки для помощи людям, потерявшим руку. Эти протезы используют датчики, чтобы чувствовать движения мышц. В некоторых новых моделях используется интерфейс мозг-компьютер, так что пользователи управляют рукой с помощью своих мыслей. Роботы-протезы помогают людям есть, писать и выполнять повседневные дела. Эти руки помогают людям жить лучше и быть более независимыми.
Космос
Космические группы используют руки-роботы для многих важных работ. На Международной космической станции Dextre и Canadarm2 помогают чинить и строить вещи. У Dextre семь суставов и чувствует прикосновения, поэтому работает осторожно. Canadarm2 перемещает Dextre в разные точки. Миссия ClearSpace-1 использует четыре руки-робота для захвата и удаления космического мусора. Эти роботы-руки делают работу в космосе более безопасной для астронавтов.
Рука космического робота | Главная задача | Специальная функция |
|---|---|---|
Dextre | Обслуживание и сборка | Семь суставов, тактильная чувствительность |
Канадарм2 | Транспортные и сборочные операции | Перемещает других роботов, гибкий |
ClearSpace-1 | Вывоз мусора | Четыре руки для захвата предметов |
Роботы-руки используются на заводах, в домах, школах, больницах и космосе. Они могут выполнять сборочные работы и работать с технологиями интерфейса мозг-компьютер. Это открывает новые идеи для будущего.
Почему роботизированные руки имеют значение?
Роботы-руки играют важную роль, поскольку они повышают эффективность, точность и безопасность в различных отраслях промышленности. Эти механические устройства автоматизируют повторяющиеся задачи, уменьшают количество человеческих ошибок и работают с опасными материалами, что в конечном итоге повышает производительность и безопасность труда.

Преимущества
Роботизированные руки помогают обеим фабрикам и больниц во многих отношениях. На заводах роботы удешевляют производство и ускоряют работу. Рабочие находятся в большей безопасности, поскольку роботы выполняют рискованную или скучную работу. В больницах роботизированные руки помогают врачам проводить операции более аккуратно. Пациенты выздоравливают быстрее, потому что порезы меньше, а кровотечение меньше. В больницах роботы убирают и приносят лекарства, что помогает остановить инфекции.
Сектор | Преимущества роботизированных рук | Вспомогательные детали и примеры |
|---|---|---|
Производство | Снижение производственных затрат, повышение производительности | Роботы заменяют людей при выполнении повторяющихся задач, повышая эффективность и поддерживая экономический рост. |
Здравоохранение | Точные, минимально инвазивные операции, более высокие показатели успеха, лучший уход за пациентами | Хирургические роботы обеспечивают 3D-видение, меньшие разрезы и более быстрое восстановление. Роботы помогают в логистике и санитарии. |
Робототехника создает протезы конечностей лучше. Некоторые роботизированные руки подключаются к нервам, благодаря чему протезы становятся более реальными и лучше работают. Социальные роботы помогают людям выздоравливать после инсультов или черепно-мозговых травм. Эти роботы подбадривают людей, помогая им завершить курс лечения и восстановить навыки.
Роботизированные руки помогают обучать медицинский персонал ведя себя как пациенты.
Роботы позволяют врачам проводить операции на расстоянии с помощью компьютеров.
Роботы с искусственным интеллектом помогают раздавать лекарства и наблюдать за пациентами, делая уход за больными более безопасным.
Ограничения
Роботы-руки тоже имеют некоторые проблемы. Они могут быть дорогими в приобретении и установке. У небольших компаний может не хватить на них денег. Некоторые виды работ требуют от людей мышления или творческого подхода, что роботам не под силу. Роботы-руки нужно часто проверять и чинить. Если один из них сломается, на его ремонт может уйти много времени и денег. В больницах врачам приходится осваивать новые способы безопасного использования роботизированных систем.
Будущее
Робототехника скоро станет еще лучше. Новые роботизированные руки будут оснащены более умными датчиками и лучшим программным обеспечением. Некоторые из них будут использовать интерфейс "мозг-компьютер", чтобы люди могли управлять руками с помощью своего разума. Это поможет людям с ограниченными возможностями и сделает хирургические операции более безопасными. Роботы будут все чаще использоваться на заводах, в больницах и домах. По мере того как роботы будут становиться все проще в использовании, все больше людей будут получать от них помощь.
Роботизированная рука состоит из простых частей, которые действуют подобно тому, как двигаются люди. Вы можете понять роботизированную руку, следуя простым шагам и примерам. Многие студенты узнают что-то новое и чувствуют себя увереннее, создавая и кодируя роботизированные руки. В таблице ниже показано, как изучение робототехники помогает учащимся добиться лучших результатов в STEM.
Аспект | Как обучение робототехнике стимулирует интерес к STEM |
|---|---|
Полученные навыки | Кодирование, инженерный дизайн, работа в команде |
Прибыль | 67% больше знаний по робототехнике, 89% лучше навыки кодирования |
Мотивация | Дружеские состязания и командная работа повышают интерес |
Изучение робототехники дает студентам новые идеи и может помочь им найти работу в будущем.
ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ
В чем разница между рукой робота и рукой человека?
В руке робота используются двигатели, датчики и металлические детали. Человеческая рука использует мышцы, нервы и кости. Обе руки могут двигаться и хватать предметы, но роботизированная рука следует запрограммированным инструкциям.
Может ли рука робота чувствовать предметы, как человек?
Рука робота не может чувствовать себя как человек. Некоторые роботизированные руки используют сенсорные датчики для обнаружения давления или контакта. Эти датчики помогают руке бережно удерживать предметы, но не дают настоящих ощущений.
Как люди управляют руками роботов?
Люди управляют роботизированными руками с помощью компьютеров, джойстиков или специальных контроллеров. В некоторых усовершенствованных манипуляторах используются интерфейсы "мозг-компьютер". Они позволяют пользователям перемещать манипулятор, обдумывая свои действия.
Безопасно ли использовать роботизированные руки рядом с людьми?
Большинство современных роботов-рук оснащены системой безопасности. Датчики останавливают манипулятор, если он приближается к человеку слишком близко. Коботы безопасно работают с людьми на заводах и в школах.
Могут ли ученики создать свои собственные руки-роботы?
Да! Многие наборы помогают школьникам создавать и программировать роботов. Эти наборы учат кодированию, конструированию и решению проблем. Школьники учатся, выполняя практические проекты.
